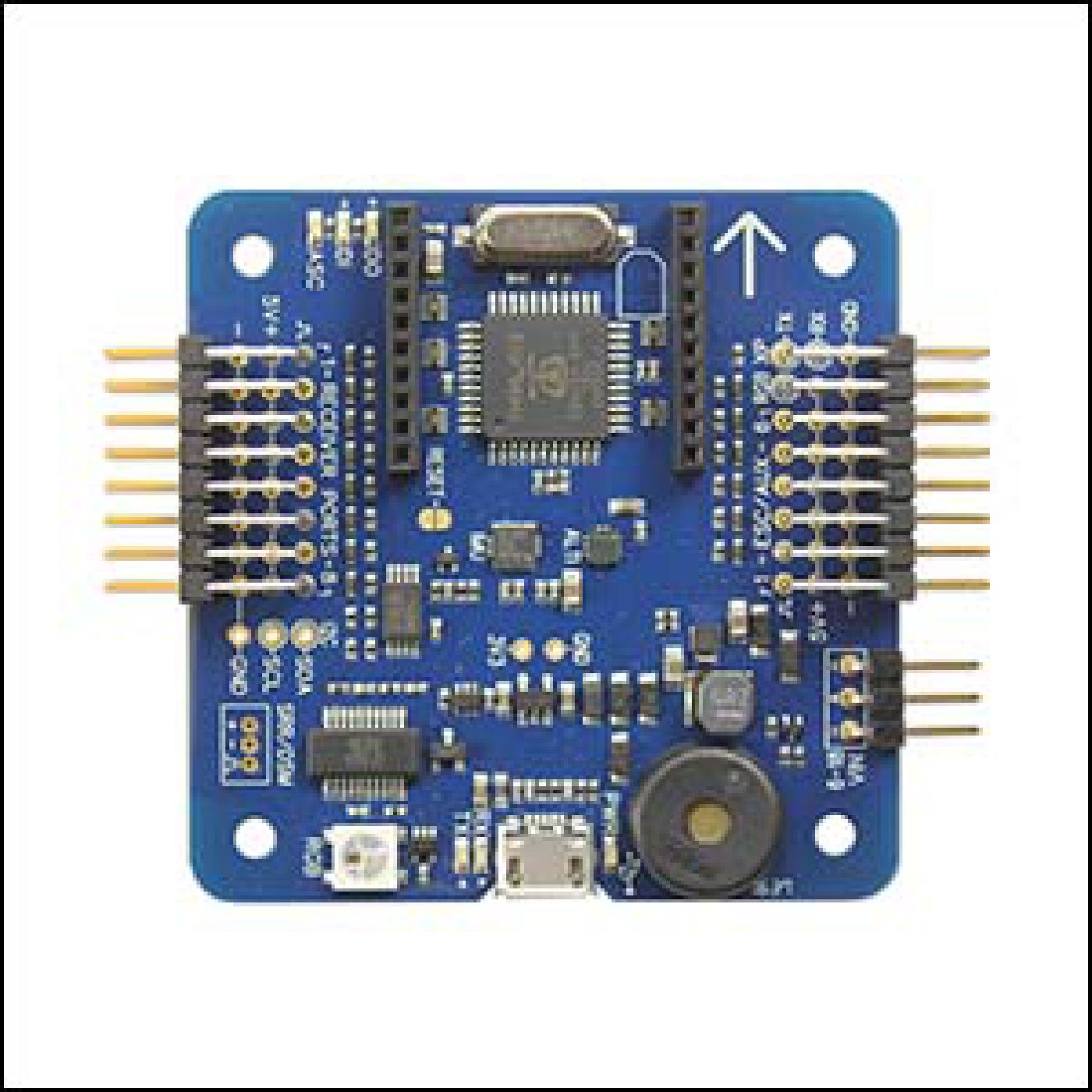
ELEV-8 Flight Controller (#80204)
The ELEV-8 Flight Controller is a single-board quadcopter control solution, designed for the Parallax ELEV-8 v3 Quadcopter (#80300). Current version is Revision B; see the product guide download for full details on this latest revision.
The ELEV-8 Flight Controller firmware works in coordination with Ground Station software for configuration, diagnostics, and live telemetery of sensor data. It's a great tool for educators and students exploring the physics principles of flight dynamics, as well as for the developer or hobbyist experimenting with custom applications.
The ELEV-8 Flight Controller features the Propeller P8X32A, a 32-bit, 8-core microcontroller. Its multi-core architecture allows for simultaneous sensor monitoring and motor control. In addition, the multiple cores and modular, open-source C-language firmware facilitate code customization—no interrupts involved!
The ELEV-8 Flight Controller hardware, its C-language firmware, and the accompanying Ground Station software are all Parallax Open Source projects; see the individual files for details.
Features
- 32-bit, 8-core, 80 MHz Propeller P8X32A and 64 KB EEPROM
- Wide supply voltage range compatible with 2S to 5S battery packs
- LSM9DS1 IMU (3D accelerometer, 3D gyroscope, 3D magnetometer)
- LPS25H pressure sensor for altimeter and barometer data
- RF module socket for wireless telemetry; XBee 900 MHz modules recommended
- Battery voltage monitor with low-battery alarm
- Onboard RGB LED and Piezospeaker for status indicators, alerts and alarms
- RGB LED expansion header; add up to 20 additional WS2812B RGB LEDs
- Serial Tx/Rx duplex expansion port
- Eight bi-directional receiver ports
- Six bi-directional ESC/AUX ports for Parallax xRotor 20A ESCs
- Unpopulated I2C bus header for custom applications
- Accessory Power Header Pads, SRR/DSM Header Pads (Rev B)
- Convenient reset touch-button pad for firmware development